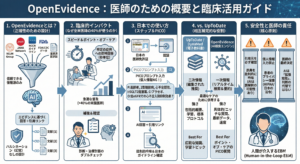

TL; DR (要約)
深いAIの学習は、情報が歪む「伝言ゲーム」のようで不安定でした。
学習を高速化・安定化させるための、2つの必須テクニック「正規化層」と「重みの初期化」の要点です。
① 課題
(内部共変量シフト)
層が深くなると、学習中に各層への入力データの分布がズレてしまい、AIが混乱。学習が不安定で非効率になる問題がありました。
② 正規化層
(データの交通整理)
BatchNormやLayerNormが、各層でデータの分布を整え、学習を安定化させる「交通整理役」を果たします。
③ 重みの初期化
(良い準備運動)
学習の「良いスタート姿勢」を決める重要なステップ。He初期化などが、勾配消失・爆発を防ぎ、学習の安定した開始を助けます。
この「交通整理」と「準備運動」を組み合わせることで、ResNetのような超深層モデルの学習が可能になります。
この章の学習目標と前提知識
はじめに:AIの訓練を、より速く、より安定させるために
皆さん、こんにちは。そして、「拡張編」へようこそ!
これまでの学習で、私たちはAIモデル開発の基本的なワークフローをマスターし、自分自身でプロジェクトを組み立てる力も身につけてきました。本当に素晴らしいことです。ここからは、いわば応用編。モデルの性能をさらに一段階引き上げ、学習をより安定させるための、少し専門的で、しかし非常に強力なテクニックの世界に足を踏み入れていきます。
AIモデルの層(depth)を深くすればするほど、より複雑で抽象的な特徴を学習でき、性能が上がる…。これは、ディープラーニングの基本的な考え方ですよね。しかし、現実には、単純に層を積み重ねるだけでは、ある時点から急に学習がうまくいかなくなってしまいます。
それはまるで、高く積み上げたジェンガのように、下のブロック(層)が少しぐらついただけでも、その影響が上のブロックに伝わるにつれてどんどん増幅し、最終的には全体がガラガラと崩れ落ちてしまう(学習が発散する)危険性をはらんでいるのです。
この問題を引き起こす主な原因の一つが、「内部共変量シフト (Internal Covariate Shift)」と呼ばれる、ちょっと難しい名前の現象です(1)。
これは、巨大な組織での「伝言ゲーム」を想像すると分かりやすいかもしれません。
- 社長(入力データ)からの指示が、部長(層1)に伝わります。
- 部長は、その指示を自分なりに解釈して(学習によってパラメータが更新され)、課長(層2)に伝えます。この時点で、既に指示のニュアンス(データの分布)は少し変わっています。
- 課長は、その「部長から来た、ちょっとニュアンスの変わった指示」を元に、係長(層3)に指示を出します。
この繰り返しで、末端の社員に届く頃には、元の指示とは全く違うものになっているかもしれません。ディープラーニングもこれと同じで、各層は、常に「前の層から来る、毎回少しずつ様子の違うデータ」に適応し続けなければならず、これでは学習が非常に非効率で不安定になってしまうのです。
内部共変量シフトのイメージ
[入力] -> [ 層1 ] -> [ 出力1 (分布A) ] -> [ 層2 ] -> [ 出力2 (分布B) ] -> ...
| |
(学習で重みが変化) (学習で重みが変化)
| |
V V
[入力] -> [ 層1' ] -> [ 出力1'(分布A') ] -> [ 層2' ] -> [ 出力2'(分布B') ] -> ...
解説:
- 層1が学習して層1'に変化すると、その出力分布もAからA'へと変化します。
- 層2にとって、自分の入力データの性質が毎回変わってしまうことになります。
- これでは、層2は「どこを基準に学習すれば良いのか」が分からず、混乱してしまいます。
- このネットワーク内部での「入力分布の変化の連鎖」が内部共変量シフトです。
そこで今回は、この深層学習の「ジェンガ」を安定させ、「伝言ゲーム」のルールを整備するための、二つの強力な「安定化装置」、すなわち正規化層(Normalization Layers)と重みの初期化手法(Weight Initialization Methods)について学びます。これらは、現代の高性能なAIモデルを構築する上では、もはや欠かせない必須のテクニックと言えるでしょう。早速、その中身を見ていきましょう!
1. 正規化層 (Normalization Layers) – 学習の「交通整理」
さて、深層学習の学習を不安定にする「内部共変量シフト」という現象、なんとなくイメージは掴めましたでしょうか。正規化層の役割は、この問題に対して、各層に入力されるデータが毎回ある程度「整った」状態になるように、巧みな交通整理を行うことです。
この交通整理のおかげで、後続の層は「前の層の都合で、自分の仕事の前提がコロコロ変わる」というストレスから解放され、学習に集中できるようになります。結果として、学習全体の高速化と安定化が期待できるんですね。ここでは、その代表的な二つの手法を見ていきましょう。
1.1 バッチ正規化 (Batch Normalization, BatchNorm) -「みんなで足並みを揃える」正規化
バッチ正規化(BatchNorm)は、特に畳み込みニューラルネットワーク(CNN)で絶大な効果を発揮し、深層学習の発展を大きく加速させた手法の一つです(1)。
基本的な考え方とアナロジー
その考え方を、テストの点数で例えてみましょう。あるクラスの生徒全員(これがミニバッチにあたります)の、科目ごと(これが特徴量ごと)の点数を想像してください。BatchNormは、
「数学のクラス平均が50点、英語が80点、というように科目ごとに平均点がバラバラだと比較しにくいので、全科目のクラス平均が0点、標準偏差が1になるように、全員の点数を一律で調整しよう」
という操作に似ています。つまり、ミニバッチ内の統計量を使って、特徴量ごとにデータのスケールを揃えるのです。
学習可能なパラメータ \(\gamma\) と \(\beta\) 〜正規化しすぎない「自由」〜
しかし、ここで一つ疑問が湧くかもしれません。「強制的に平均0、分散1に整えてしまうと、元々あったデータの分布が持つ有益な情報まで失われてしまうのでは?」と。素晴らしい視点です。
そこでBatchNormは、ただ正規化するだけでなく、その後に学習可能な2つのパラメータ、スケール係数 \(\gamma\)(ガンマ)とシフト係数 \(\beta\)(ベータ)を使って、再度線形変換を行います。
\[ y = \gamma \cdot \hat{x} + \beta \]
(ここで \(\hat{x}\) は平均0、分散1に正規化された入力です)
これは、AIモデルに「一度、基準を揃えるために正規化はしたけれど、この層にとっては、やっぱり平均が0.5で分散が1.2くらいの分布の方が学習しやすいんだ」という「元に戻す自由」を与えている、と考えることができます。この\(\gamma\)と\(\beta\)も、他の重みと同様に学習を通じて最適化されていきます。この柔軟性がBatchNormの強力さの秘密の一つなんですね。
【最重要】訓練時と推論時の違い
BatchNormを扱う上で、絶対に知っておかなければならないのが、訓練時と推論(テスト)時で振る舞いが異なるという点です。これは、初心者が陥りやすいワナでもあります。
訓練時は、ミニバッチごとの平均・分散を使って正規化しますが、推論時(model.eval()モード)には、たった1枚の画像や1人の患者データだけを予測したい場合があり、バッチの統計量が使えません。そこでBatchNorm層は、訓練中に見てきたたくさんのミニバッチの統計量の移動平均(running mean/variance)をこっそり蓄積しておき、推論時にはその蓄積された値を使って正規化を行います。これにより、いつでも安定した変換が可能になるのです。
正規化層の働き方の違い
ミニバッチデータ (バッチサイズ N × 特徴量次元 D)
[ 特徴量 1 ] [ 特徴量 2 ] ... [ 特徴量 D ]
[標本1] x_11 x_12 ... x_1D
[標本2] x_21 x_22 ... x_2D
...
[標本N] x_N1 x_N2 ... x_ND
↓ BatchNormの正規化方向 (特徴量ごと)
(この列の平均・分散を計算)
<-- LayerNormの正規化方向 (データサンプルごと)
(この行の平均・分散を計算)
1.2 レイヤー正規化 (LayerNorm) -「個人の中でバランスを取る」正規化
次に、レイヤー正規化(LayerNorm)を見ていきましょう。これは、バッチ正規化とは全く異なる発想から生まれた正規化手法で、特にTransformerのような、自然言語処理で活躍するモデルでは、今や標準的な部品となっています(2)。
基本的な考え方とアナロジー
先ほどのテストの例で言えば、LayerNormは、
「クラス全体の平均点は気にしない。その代わり、Aさん個人の全科目の点数が、平均0、標準偏差1になるように調整しよう。Bさんの点数も、Bさん自身の全科目平均が0になるように調整しよう」
という操作です。Aさんの点数調整に、Bさんの点数は一切関係ありません。あくまで個人内の成績のばらつきを整えるイメージですね。
BatchNormとの違い
このアプローチのおかげで、LayerNormはバッチサイズ(クラスの生徒数)が非常に小さい、例えば1の場合でも安定して動作します。また、各データの処理がバッチ内の他のデータから独立しているため、文章のようにサンプルごとに長さが異なる系列データを扱うRNNやTransformerと、非常に相性が良いのです。
Pythonコード例:正規化層の効果を見てみる
では、この二つの正規化層の振る舞いの違いを、PyTorchコードで実際に見て、その効果を体感してみましょう。
graph TD
A["開始"] --> B["1. 比較用のデータを作成"];
B --> C["2. データにバッチ正規化を適用
(→ 特徴量(列)ごとに正規化されることを確認)"];
C --> D["3. 元のデータにレイヤー正規化を適用
(→ サンプル(行)ごとに正規化されることを確認)"];
D --> E["終了"];
# 必要なライブラリをインポートします
import torch
import torch.nn as nn
# --- 1. ダミーデータを作成 ---
# バッチサイズ2、特徴量3のデータだとします。
# 2人の患者さん、それぞれ3つの検査値のようなイメージです。
# 1人目は全体的に値が小さく、2人目は大きい、という偏ったデータを作ります。
input_data = torch.tensor([
[1.0, 2.0, 3.0], # サンプル1
[10.0, 11.0, 12.0] # サンプル2
], dtype=torch.float32)
print("--- 元のデータ ---")
print(input_data)
print(f"サンプル1の平均: {input_data[0].mean():.2f}, 標準偏差: {input_data[0].std():.2f}")
print(f"サンプル2の平均: {input_data[1].mean():.2f}, 標準偏差: {input_data[1].std():.2f}\n")
# --- 2. バッチ正規化 (BatchNorm) を適用 ---
# nn.BatchNorm1d は、(バッチサイズ, 特徴量) という形のデータに適用します。
# 引数には特徴量の数(3)を指定します。
batch_norm = nn.BatchNorm1d(num_features=3)
# モデルを評価モードにして、学習済みの移動平均・分散が使われる状態をシミュレートします。
# この例では、学習が行われていないので、移動平均0, 分散1で正規化されます。
batch_norm.eval()
output_bn = batch_norm(input_data)
print("--- バッチ正規化(BatchNorm)適用後 ---")
print(output_bn)
# BatchNormは「特徴量ごと」(列ごと)に正規化するため、
# 各列の平均が0に、標準偏差が1に近くなります。
print(f"列0の平均: {output_bn[:, 0].mean():.2f}, 列0の標準偏差: {output_bn[:, 0].std():.2f}\n")
# --- 3. レイヤー正規化 (LayerNorm) を適用 ---
# LayerNormでは、正規化したい特徴量の形状(この場合は3つの特徴量)を引数に取ります。
layer_norm = nn.LayerNorm(normalized_shape=3)
output_ln = layer_norm(input_data)
print("--- レイヤー正規化(LayerNorm)適用後 ---")
print(output_ln)
# LayerNormは「データサンプルごと」(行ごと)に正規化するため、
# 各行の平均が0に、標準偏差が1に近くなります。
print(f"サンプル1の平均: {output_ln[0].mean():.2f}, 標準偏差: {output_ln[0].std():.2f}")
print(f"サンプル2の平均: {output_ln[1].mean():.2f}, 標準偏差: {output_ln[1].std():.2f}")
2. 重みの初期化 (Weight Initialization) – 学習の「良いスタートダッシュ」
モデルの学習を安定させる、もう一つの非常に重要な要素が、学習開始前の重み(パラメータ)の初期値をどのように設定するか、という問題です。これは、学習の成否を分ける、縁の下の力持ちのような存在なんですよ。
2.1 なぜ初期化が重要なのか? 〜スタートの姿勢が勝負を分ける〜
もし、マラソンをスタートする時に、非常に悪い姿勢で走り始めたら、すぐにバランスを崩して転んでしまったり、無駄な体力を使ったりしてしまいますよね。AIの学習も全く同じで、不適切な初期値(悪いスタート姿勢)から学習を始めると、学習の序盤で勾配消失や勾配爆発を引き起こし、学習が全く進まない、ということになりかねません。
では、「良いスタート姿勢」とは何でしょうか?それは、ネットワークの各層で、入力信号の分散(情報のばらつき具合)が、出力後も大きく変わらないようにすることです。
これを情報の「声量」に例えてみましょう。層を通過するたびに声量がどんどん小さくなって、最後には聞こえなくなってしまっては困ります(勾配消失)。逆に、声量がどんどん大きくなって、音が割れてしまうのも困ります(勾配爆発)。良い初期化は、各層が「適切な声量」で次の層に情報を伝達できるように、最初のボリューム設定を賢く調整してあげるようなものなのです。
初期化による信号伝播のイメージ
[悪い初期化の例]
入力信号 → [層1] → [層2] → [層3] → [層4] → ... → [信号が消失または爆発]
(分布:OK) (分布:偏る) (分布:さらに偏る) (分布:極端に) (学習不能)
[良い初期化の例]
入力信号 → [層1] → [層2] → [層3] → [層4] → ... → [安定して伝播]
(分布:OK) (分布:安定) (分布:安定) (分布:安定) (学習が進む)
2.2 代表的な初期化手法 〜活性化関数との「相性」〜
ここでは、この「適切な声量」を保つために、活性化関数との「相性」を考えて設計された、二つの代表的な初期化手法を紹介します。どの初期化手法を選ぶかは、どの活性化関数を使うかと密接に関係しているんですね。
Xavier (ザビエル) / Glorot (グロロット) 初期化
2010年に提案された、古典的かつ重要な初期化手法です(3)。
- 相性が良い活性化関数: 主に
tanhやsigmoidのような、出力が0を中心に対称な活性化関数。 - 考え方: 入力ノードの数(
fan_in)と出力ノードの数(fan_out)の両方を考慮して、「入出力のノード数が違っても、信号の分散がだいたい同じくらいになるように」重みの初期値を調整します。 - 数式(一様分布の場合): \[ W \sim U \left( -\sqrt{\frac{6}{\text{fan\_in} + \text{fan\_out}}}, +\sqrt{\frac{6}{\text{fan\_in} + \text{fan\_out}}} \right) \] (ここで \(U(a,b)\) は、aからbまでの一様な確率で値をとる一様分布を意味します。)
He (ヒー) 初期化
こちらは、現代の深層学習で主流となっているReLUのために提案された手法です(4)。
- 相性が良い活性化関数:
ReLUおよびその派生の活性化関数(LeakyReLUなど)。現在のデファクトスタンダードと言えるでしょう。 - 考え方: なぜXavierではダメなのでしょうか?それは、ReLUが負の入力を全て0にしてしまう特性にあります。これにより、信号の分散が理論上、半分になってしまうんですね。He初期化は、その効果をあらかじめ見越して、Xavier初期化よりも少し大きな分散(おおよそ2倍)を持つように重みを初期化します。具体的には、出力ノード数(
fan_out)は考慮せず、入力ノード数(fan_in)のみを元に計算します。 - 数式(正規分布の場合): \[ W \sim \mathcal{N} \left( 0, \sqrt{\frac{2}{\text{fan\_in}}} \right) \] (ここで \(\mathcal{N}(\mu, \sigma)\) は、平均\(\mu\)、標準偏差\(\sigma\)の正規分布(ガウス分布)を意味します。)
Pythonコード例:PyTorchで重みを初期化する
では、PyTorchでこのHe初期化を実際にどうやって適用するのか、見ていきましょう。モデルの全ての層を一つ一つ見て回り、特定の種類の層(今回はnn.Linear)を見つけたら、そこに初期化を適用する、という関数を作るのが一般的なアプローチです。
graph TD
A["開始"] --> B["1. AIモデルを準備
(デフォルトの初期値でインスタンス化)"];
B --> C["2. 重み初期化のルールを定義
(He初期化を行う関数を作成)"];
C --> D["3. モデル全体に初期化ルールを適用
(定義した関数をモデルの各層に適用)"];
D --> E["4. 結果を確認
(層の重みが変更されたことを表示)"];
E --> F["終了"];
# 必要なライブラリをインポートします
import torch
import torch.nn as nn
# --- 0. サンプルとなる簡単なモデルを定義 ---
# He初期化はReLUと相性が良いため、活性化関数にReLUを使ったモデルを用意します。
class SimpleNet(nn.Module):
def __init__(self, input_features):
super(SimpleNet, self).__init__()
self.layer1 = nn.Linear(input_features, 64)
self.relu = nn.ReLU()
self.layer2 = nn.Linear(64, 32)
self.layer3 = nn.Linear(32, 2)
def forward(self, x):
x = self.relu(self.layer1(x))
x = self.relu(self.layer2(x))
x = self.layer3(x)
return x
# --- 1. モデルをインスタンス化 ---
# まず、モデルの実体を作ります。この時点ではPyTorchのデフォルト初期化がされています。
model = SimpleNet(input_features=13)
print("--- 初期化前のlayer1の重み (一部抜粋) ---")
print(model.layer1.weight.data[0, :5]) # 最初の5つの重みだけ見てみましょう
# --- 2. He初期化を適用する関数を定義 ---
def initialize_weights_he(module):
# もし、そのモジュール(module)が線形層(nn.Linear)であれば...
if isinstance(module, nn.Linear):
# He初期化(正規分布)を適用します。
# kaiming_normal_ のように末尾にアンダースコアが付くものは、元のテンソルを直接書き換える「インプレース操作」です。
# nonlinearity='relu'と指定することで、ReLUに最適な初期化を行ってくれます。
nn.init.kaiming_normal_(module.weight, mode='fan_in', nonlinearity='relu')
# もしバイアス項があれば、0で初期化します。
if module.bias is not None:
nn.init.constant_(module.bias, 0)
# --- 3. モデル全体に初期化を適用 ---
# model.apply(関数) を使うと、モデル内の全ての層・部品(モジュール)に対して、
# 指定した関数(ここではinitialize_weights_he)が再帰的に適用されます。
model.apply(initialize_weights_he)
print("\n--- He初期化後のlayer1の重み (一部抜粋) ---")
# 初期化後の重みを確認してみましょう。値が変わっているはずです。
print(model.layer1.weight.data[0, :5])
# === ここから下が上記のprint文による実際の出力の例(乱数値なので毎回変わります) ===
# --- 初期化前のlayer1の重み (一部抜粋) ---
# tensor([-0.1166, -0.0201, 0.2116, -0.1963, 0.1328])
#
# --- He初期化後のlayer1の重み (一部抜粋) ---
# tensor([ 0.1788, -0.6358, 0.1362, 0.0369, 0.2295])
3. まとめと次のステップへ
今回は、深いモデルの学習を安定させ、性能を向上させるための二つの強力な「安定化装置」、正規化層(BatchNorm, LayerNorm)と重みの初期化(Xavier, He)について学びました。
- 正規化層は、学習中の各層への入力の分布を整える「交通整理役」。
- 重みの初期化は、学習がスムーズに始まるための「良いスタートダッシュ」を促す。
これらは互いに排他的なものではなく、現代的な深いニューラルネットワークでは、例えばHe初期化で重みの初期値を設定し、さらにBatchNormやLayerNormを各層に配置する、というように両方を組み合わせて使うのが一般的です。
正規化と初期化によって、私たちはより深いネットワークを訓練する準備ができました。しかし、さらに深く、何百層ものネットワークを訓練するには、まだ「勾配消失」という大きな壁が立ちはだかります。
次回の第20回では、この壁を「スキップ接続」という画期的なアイデアで乗り越えるResNetについて学び、さらに深いAIの世界へと進んでいきます。
参考文献
- Ioffe S, Szegedy C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. In: Proceedings of the 32nd International Conference on Machine Learning. 2015. p. 448-456.
- Ba JL, Kiros JR, Hinton GE. Layer normalization. arXiv preprint arXiv:1607.06450. 2016.
- Glorot X, Bengio Y. Understanding the difficulty of training deep feedforward neural networks. In: Proceedings of the thirteenth international conference on artificial intelligence and statistics. 2010. p. 249-256.
- He K, Zhang X, Ren S, Sun J. Delving deep into rectifiers: Surpassing human-level performance on ImageNet classification. In: Proceedings of the IEEE international conference on computer vision. 2015. p. 1026-1034.
ご利用規約(免責事項)
当サイト(以下「本サイト」といいます)をご利用になる前に、本ご利用規約(以下「本規約」といいます)をよくお読みください。本サイトを利用された時点で、利用者は本規約の全ての条項に同意したものとみなします。
第1条(目的と情報の性質)
- 本サイトは、医療分野におけるAI技術に関する一般的な情報提供および技術的な学習機会の提供を唯一の目的とします。
- 本サイトで提供されるすべてのコンテンツ(文章、図表、コード、データセットの紹介等を含みますが、これらに限定されません)は、一般的な学習参考用であり、いかなる場合も医学的な助言、診断、治療、またはこれらに準ずる行為(以下「医行為等」といいます)を提供するものではありません。
- 本サイトのコンテンツは、特定の製品、技術、または治療法の有効性、安全性を保証、推奨、または広告・販売促進するものではありません。紹介する技術には研究開発段階のものが含まれており、その臨床応用には、さらなる研究と国内外の規制当局による正式な承認が別途必要です。
- 本サイトは、情報提供を目的としたものであり、特定の治療法を推奨するものではありません。健康に関するご懸念やご相談は、必ず専門の医療機関にご相談ください。
第2条(法令等の遵守)
利用者は、本サイトの利用にあたり、医師法、医薬品、医療機器等の品質、有効性及び安全性の確保等に関する法律(薬機法)、個人情報の保護に関する法律、医療法、医療広告ガイドライン、その他関連する国内外の全ての法令、条例、規則、および各省庁・学会等が定める最新のガイドライン等を、自らの責任において遵守するものとします。これらの適用判断についても、利用者が自ら関係各所に確認するものとし、本サイトは一切の責任を負いません。
第3条(医療行為における責任)
- 本サイトで紹介するAI技術・手法は、あくまで研究段階の技術的解説であり、実際の臨床現場での診断・治療を代替、補助、または推奨するものでは一切ありません。
- 医行為等に関する最終的な判断、決定、およびそれに伴う一切の責任は、必ず法律上その資格を認められた医療専門家(医師、歯科医師等)が負うものとします。AIによる出力を、資格を有する専門家による独立した検証および判断を経ずに利用することを固く禁じます。
- 本サイトの情報に基づくいかなる行為によって利用者または第三者に損害が生じた場合も、本サイト運営者は一切の責任を負いません。実際の臨床判断に際しては、必ず担当の医療専門家にご相談ください。本サイトの利用によって、利用者と本サイト運営者の間に、医師と患者の関係、またはその他いかなる専門的な関係も成立するものではありません。
第4条(情報の正確性・完全性・有用性)
- 本サイトは、掲載する情報(数値、事例、ソースコード、ライブラリのバージョン等)の正確性、完全性、網羅性、有用性、特定目的への適合性、その他一切の事項について、何ら保証するものではありません。
- 掲載情報は執筆時点のものであり、予告なく変更または削除されることがあります。また、技術の進展、ライブラリの更新等により、情報は古くなる可能性があります。利用者は、必ず自身で公式ドキュメント等の最新情報を確認し、自らの責任で情報を利用するものとします。
第5条(AI生成コンテンツに関する注意事項)
本サイトのコンテンツには、AIによる提案を基に作成された部分が含まれる場合がありますが、公開にあたっては人間による監修・編集を経ています。利用者が生成AI等を用いる際は、ハルシネーション(事実に基づかない情報の生成)やバイアスのリスクが内在することを十分に理解し、その出力を鵜呑みにすることなく、必ず専門家による検証を行うものとします。
第6条(知的財産権)
- 本サイトを構成するすべてのコンテンツに関する著作権、商標権、その他一切の知的財産権は、本サイト運営者または正当な権利を有する第三者に帰属します。
- 本サイトのコンテンツを引用、転載、複製、改変、その他の二次利用を行う場合は、著作権法その他関連法規を遵守し、必ず出典を明記するとともに、権利者の許諾を得るなど、適切な手続きを自らの責任で行うものとします。
第7条(プライバシー・倫理)
本サイトで紹介または言及されるデータセット等を利用する場合、利用者は当該データセットに付随するライセンス条件および研究倫理指針を厳格に遵守し、個人情報の匿名化や同意取得の確認など、適用される法規制に基づき必要とされるすべての措置を、自らの責任において講じるものとします。
第8条(利用環境)
本サイトで紹介するソースコードやライブラリは、執筆時点で特定のバージョンおよび実行環境(OS、ハードウェア、依存パッケージ等)を前提としています。利用者の環境における動作を保証するものではなく、互換性の問題等に起因するいかなる不利益・損害についても、本サイト運営者は責任を負いません。
第9条(免責事項)
- 本サイト運営者は、利用者が本サイトを利用したこと、または利用できなかったことによって生じる一切の損害(直接損害、間接損害、付随的損害、特別損害、懲罰的損害、逸失利益、データの消失、プログラムの毀損等を含みますが、これらに限定されません)について、その原因の如何を問わず、一切の法的責任を負わないものとします。
- 本サイトの利用は、学習および研究目的に限定されるものとし、それ以外の目的での利用はご遠慮ください。
- 本サイトの利用に関連して、利用者と第三者との間で紛争が生じた場合、利用者は自らの費用と責任においてこれを解決するものとし、本サイト運営者に一切の迷惑または損害を与えないものとします。
- 本サイト運営者は、いつでも予告なく本サイトの運営を中断、中止、または内容を変更できるものとし、これによって利用者に生じたいかなる損害についても責任を負いません。
第10条(規約の変更)
本サイト運営者は、必要と判断した場合、利用者の承諾を得ることなく、いつでも本規約を変更することができます。変更後の規約は、本サイト上に掲載された時点で効力を生じるものとし、利用者は変更後の規約に拘束されるものとします。
第11条(準拠法および合意管轄)
本規約の解釈にあたっては、日本法を準拠法とします。本サイトの利用および本規約に関連して生じる一切の紛争については、東京地方裁判所を第一審の専属的合意管轄裁判所とします。
For J³, may joy follow you.