
最適な「次の一手」を導き出す。
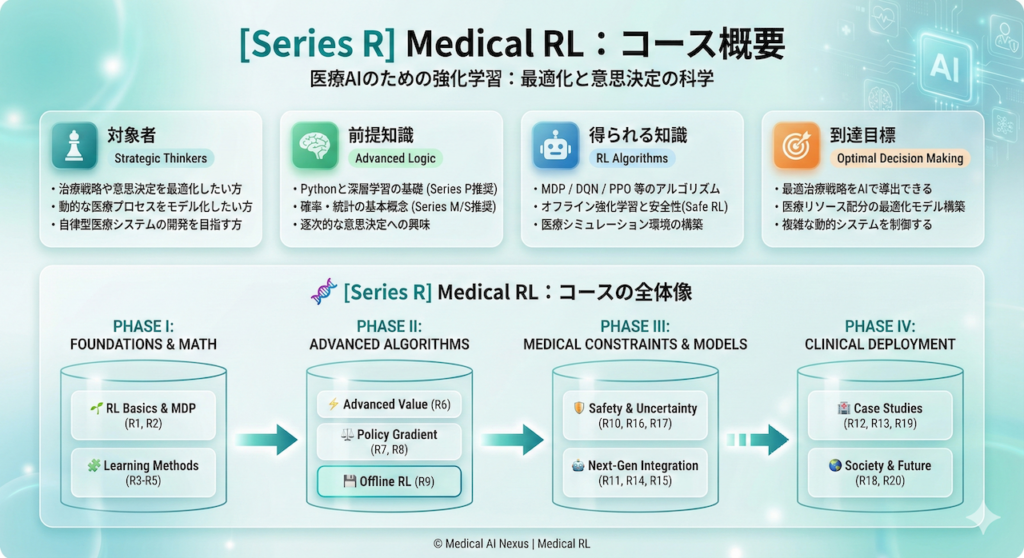
治療戦略の最適化や動的な意思決定支援。試行錯誤を通じて学習する「強化学習」の理論を学び、静的な予測を超えた、動的な医療AIアプローチを探求します。
[Series R] Medical RL : コースの全体像
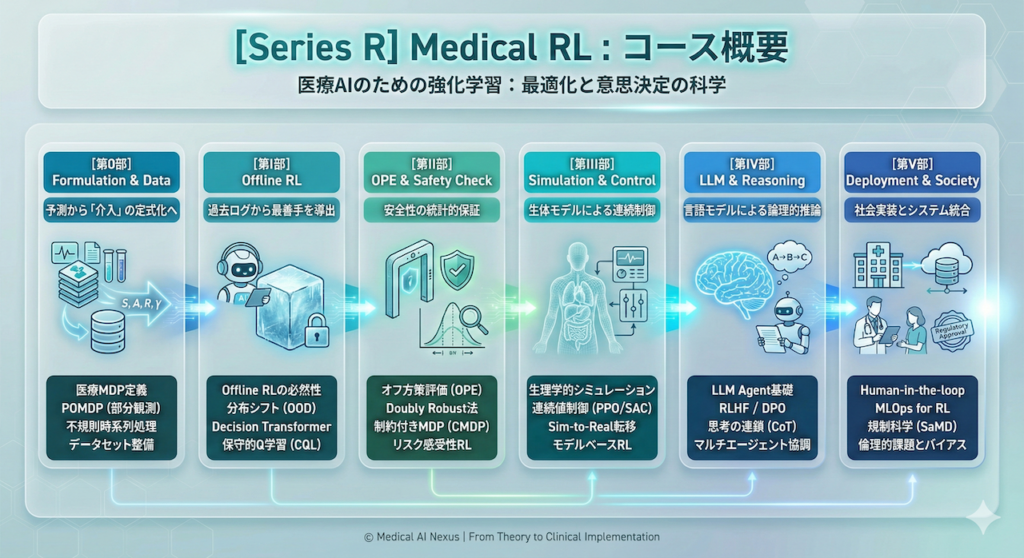
第0部:医療MDPの定式化 — 予測から「介入」へ
| ID | タイトル | 概要・キーワード |
|---|---|---|
| R01 | R01:予測モデル vs 方策モデル | 教師あり学習 (SL), 介入効果, 反事実 (Counterfactual), 交絡因子, 方策 (π), 予測誤差 vs 意思決定誤差 |
| R02 | R02:医療MDPの定義 | マルコフ決定過程 (MDP), 状態空間 (S), 行動空間 (A), 報酬関数 (R), 割引率 (γ), ホライゾン (H), 軌跡 (τ) |
| R03 | R03:部分観測性 (POMDP) | POMDP, 信念状態 (b), 隠れ状態, 観測関数 (O), 状態表現学習, バイオマーカーの不確実性 |
| R04 | R04:不規則時系列の処理 | 不規則時系列, 有益な欠測 (Informative Missingness), 欠損値補完, RNN/LSTM, Neural ODE, 電子カルテ前処理 |
| R05 | R05:バンディット問題と臨床試験 | 多腕バンディット (MAB), 文脈付きバンディット, リグレット最小化, ランダム化比較試験 (RCT), 適応的ランダム化, LinUCB |
| R06 | R06:因果推論とRL | 因果推論, Do演算子 (do(x)), シンプソンのパラドックス, 傾向スコア, 逆確率重み付け (IPW), 未観測の交絡因子 |
| R07 | R07:探索と活用のジレンマ (医療版) | 探索と活用, ε-Greedy法, UCB (信頼区間上限), トンプソンサンプリング, 安全性制約, 倫理的課題 |
| R08 | R08:モデルベース vs モデルフリー | モデルベースRL, モデルフリーRL, プランニング, 動的計画法, サンプル効率, 生理学的事前知識 |
| R09 | R09:環境構築 (Gymnasium) | Gymnasium API, Env.step(), Env.reset(), 観測空間, 行動空間, 報酬シェイピング, 疎な報酬 (Sparse Reward) |
| R10 | R10:[演習] データセットの整備 | MIMIC-IV, eICU, コホート選択, SQL, Pandas, 状態・行動ペア作成, データクリーニング |
第I部:Offline RL — 「探索できない」現実との闘い
〜 過去の診療ログ(ゴミの山)から、最善手(宝石)を見つける 〜
| ID | タイトル | 概要・キーワード |
|---|---|---|
| R11 | Offline RLの必然性 | オフライン強化学習 (Batch RL), 静的データセット, 挙動方策 (πβ), ターゲット方策 (π), 相互作用なしの学習 |
| R12 | 分布シフト (Distribution Shift) | 分布シフト, 分布外 (OOD), 外挿誤差, 過大評価バイアス, サポート制約, 共変量シフト |
| R13 | 行動模倣 (Behavior Cloning) | 行動模倣 (BC), 教師あり学習, 交差エントロピー損失, 模倣学習, エキスパートのデモンストレーション |
| R14 | BCの限界と複合誤差 | 複合誤差, 状態分布の不一致, Dagger (参考), インタラクティブな専門家, 準最適なデータ |
| R15 | 保守的Q学習 (CQL) | Conservative Q-Learning (CQL), Q値の正則化, 悲観的更新, 下界最大化, パラメータ α の調整 |
| R16 | IQL (Implicit Q-Learning) | Implicit Q-Learning (IQL), エクスペクタイル回帰, SARSA形式の更新, インサンプル学習, アドバンテージ重み付き回帰 (AWR) |
| R17 | Decision Transformer (DT) | Decision Transformer, 系列モデリング, Transformer, Return-to-Go (RTG), 注意機構, プロンプティング |
| R18 | Trajectory Transformer | Trajectory Transformer (TT), ビームサーチ, 離散化, Transformerによる計画, 長期依存性 |
| R19 | 不確実性の定量化 | 認識論的不確実性, 偶然的不確実性, アンサンブル学習, ドロップアウト, ベイズニューラルネットワーク, OOD検知 |
| R20 | [演習] 敗血症治療方策の学習 | d3rlpy, オフラインRLパイプライン, 敗血症治療, 昇圧剤, 輸液, 行動の離散化 |
第II部:OPE & Safety — 統計的評価とリスク管理
〜 実戦投入前に「安全性」を数学的に保証する 〜
| ID | タイトル | 概要・キーワード |
|---|---|---|
| R21 | オフ方策評価 (OPE) 概論 | オフ方策評価 (OPE), ターゲット方策の価値, 推定器, 反事実的評価, 安全性保証 |
| R22 | 重点サンプリング (IS / WIS) | 重点サンプリング (IS), 加重重点サンプリング (WIS), 重点比 (密度比), 高い分散 |
| R23 | Doubly Robust (DR) 法 | Doubly Robust (DR), 制御変数, 分散低減, モデルバイアス, 直接法 (DM) |
| R24 | Fitted Q Evaluation (FQE) | Fitted Q Evaluation (FQE), Q関数の回帰, Neural FQE, ミニマックス最適化, 検証精度 |
| R25 | OPEの信頼区間 | 信頼区間 (CI), ブートストラップ法, 下限値, ヘフディングの不等式, t検定, リスク評価 |
| R26 | 制約付きMDP (CMDP) | 制約付きMDP (CMDP), コスト信号 (C), ラグランジュ乗数, 主双対最適化, 安全性予算 |
| R27 | CPO (Constrained Policy Optimization) | Constrained Policy Optimization (CPO), 信頼領域, 実行可能領域, 直線探索, 制約の近似充足 |
| R28 | リスク感受性RL | リスク感受性RL, CVaR (条件付きバリュー・アット・リスク), VaR, 分布型強化学習, 最悪ケース性能 |
| R29 | 解釈可能性 (XRL) | 説明可能RL (XRL), SHAP, サリエンシーマップ, 決定木への蒸留, 反実仮想的説明 |
| R30 | [演習] OPEによる臨床的妥当性検証 | ope-tools, スコープ, 仮説検定, 感度分析, 医師の方策との比較 |
第III部:Simulation & Control — 生体モデルと連続制御
〜 デジタルツイン(生体シミュレータ)を用いた精密制御 〜
| ID | タイトル | 概要・キーワード |
|---|---|---|
| R31 | 生理学的シミュレーション (PK/PD) | 常微分方程式 (ODE), PK/PDモデリング, コンパートメントモデル, 薬物動態学, 仮想患者 |
| R32 | 連続値制御アルゴリズム | 連続制御, PPO (Proximal Policy Optimization), SAC (Soft Actor-Critic), エントロピー正則化, ガウス方策 |
| R33 | がん治療の最適化 | 腫瘍増殖モデル, ゴンペルツ増殖, 化学療法スケジュール, 多目的最適化, パレートフロンティア |
| R34 | 麻酔深度の閉ループ制御 | 閉ループ制御, PID制御, TCI (目標制御注入), プロポフォール, BISモニター, 遅延システム |
| R35 | 人工呼吸器の制御 | 人工呼吸管理, ARDS, PEEP最適化, FiO2, 呼吸ごとの制御, 非同調 (Asynchrony) |
| R36 | Sim-to-Real 転移 | Sim-to-Real, リアリティギャップ, システム同定, キャリブレーション, デジタルツイン |
| R37 | ドメインランダム化 (DR) | ドメインランダム化, ロバスト性, パラメータ摂動, 視覚的ランダム化, ダイナミクスランダム化 |
| R38 | モデルベースRL (MBRL) | モデルベースRL, 世界モデル (World Models), DreamerV3, RSSM (回帰状態空間モデル), 潜在ダイナミクス, 潜在空間での計画 |
| R39 | 階層型強化学習 (HRL) | 階層型RL, オプションフレームワーク, 時間的抽象化, マネージャー・ワーカー構造, サブゴール, Semi-MDP |
| R40 | [演習] がん化学療法のレジメン最適化 | Stable-Baselines3, カスタム環境 (Gym), 報酬関数設計, ハイパーパラメータ調整, シミュレーション分析 |
第IV部:LLM & Reasoning — 言語モデルによる意思決定
〜 「数値」だけでなく「論理」で推論するエージェント 〜
| ID | タイトル | 概要・キーワード |
|---|---|---|
| R41 | LLM Agentの基礎 | LLMエージェント, ReAct (Reason+Act), ツール利用, 関数呼び出し, ゼロショット計画, コンテキストウィンドウ |
| R42 | RLHF (Reinforcement Learning from Human Feedback) | RLHF, 報酬モデル (RM), イロレーティング, Bradley-Terryモデル, KLダイバージェンスペナルティ, PPO for LLM |
| R43 | DPO (Direct Preference Optimization) | DPO, 暗黙の報酬, 参照モデル, 選好データ, 安定した学習, 対数確率 |
| R44 | 思考の連鎖 (CoT) の強化学習 | 思考の連鎖 (CoT), 推論の痕跡, DeepSeek-R1, GRPO (Group Relative Policy Optimization), 論理的一貫性 |
| R45 | プロセス報酬モデル (PRM) | プロセス報酬モデル (PRM), 結果報酬モデル (ORM), ステップごとの検証, MCTS (モンテカルロ木探索), 数学・論理推論 |
| R46 | Med-Agentの実装 | RAG (検索拡張生成), ベクトルデータベース, ナレッジグラフ, 診療ガイドライン, LangChain / LangGraph |
| R47 | マルチエージェント協調 | マルチエージェントRL (MARL), ロールプレイング, 議論, 合意形成, CTDE (集中学習・分散実行), コミュニケーション |
| R48 | 臨床要約の生成と評価 | 臨床要約, 情報抽出, NLPのための強化学習, ROUGE / BERTScore, 幻覚 (Hallucination) の低減 |
| R49 | 自己修正 (Self-Correction) | 自己修正, 自己洗練, Constitutional AI, RLAIF (AIフィードバックによるRL), 批評と修正 |
| R50 | [演習] 診断推論エージェントの構築 | ファインチューニング (SFT), GRPO実装, 医療QAデータセット (PubMedQA/MedQA), 評価指標 |
第V部:Deployment — 社会実装と規制科学
〜 研究室から病院へ。システムとしての統合 〜
| ID | タイトル | 概要・キーワード |
|---|---|---|
| R51 | Human-in-the-loop (HITL) | Human-in-the-Loop, 臨床意思決定支援 (CDS), 認知的負荷, 信頼の較正, オーバーライド機構 |
| R52 | MLOps for RL | MLOps, 特徴量ストア, モデルレジストリ, 学習パイプライン, 推論サーバー, 実験追跡 (MLflow) |
| R53 | ドリフト検知とモニタリング | コンセプトドリフト, データドリフト, 共変量シフト検知, 継続的学習 (CL), 破滅的忘却 |
| R54 | 医療情報標準 (FHIR/HL7) | FHIR (Fast Healthcare Interoperability Resources), HL7, EHR連携, SMART on FHIR, 相互運用性 |
| R55 | 連合学習 (Federated RL) | 連合学習 (FL), 連合RL, プライバシー保護AI, 差分プライバシー, 安全な集約 |
| R56 | 規制科学 (Regulatory Science) | SaMD (医療機器プログラム), FDAガイドライン, PCCP (所定変更制御計画), GMLP, リスク管理 |
| R57 | 臨床試験デザイン | 臨床試験デザイン, RCT (ランダム化比較試験), 非劣性試験, 主要/副次評価項目, サンプルサイズ計算 |
| R58 | 倫理的課題とバイアス | アルゴリズム的公平性, 配分バイアス, 医療の公平性, 説明責任, 透明性, トロッコ問題 |
| R59 | Computational Medicineの未来 | AGI (汎用人工知能), 汎用医療AI, 基盤モデル, 個別化医療, デジタルツイン |
| R60 | [最終課題] End-to-End System Design | システムアーキテクチャ, 問題定義, モデルライフサイクル, ROI (投資対効果), 実装計画 |
ご利用規約(免責事項)
当サイト(以下「本サイト」といいます)をご利用になる前に、本ご利用規約(以下「本規約」といいます)をよくお読みください。本サイトを利用された時点で、利用者は本規約の全ての条項に同意したものとみなします。
第1条(目的と情報の性質)
- 本サイトは、医療分野におけるAI技術に関する一般的な情報提供および技術的な学習機会の提供を唯一の目的とします。
- 本サイトで提供されるすべてのコンテンツ(文章、図表、コード、データセットの紹介等を含みますが、これらに限定されません)は、一般的な学習参考用であり、いかなる場合も医学的な助言、診断、治療、またはこれらに準ずる行為(以下「医行為等」といいます)を提供するものではありません。
- 本サイトのコンテンツは、特定の製品、技術、または治療法の有効性、安全性を保証、推奨、または広告・販売促進するものではありません。紹介する技術には研究開発段階のものが含まれており、その臨床応用には、さらなる研究と国内外の規制当局による正式な承認が別途必要です。
- 本サイトは、情報提供を目的としたものであり、特定の治療法を推奨するものではありません。健康に関するご懸念やご相談は、必ず専門の医療機関にご相談ください。
第2条(法令等の遵守)
利用者は、本サイトの利用にあたり、医師法、医薬品、医療機器等の品質、有効性及び安全性の確保等に関する法律(薬機法)、個人情報の保護に関する法律、医療法、医療広告ガイドライン、その他関連する国内外の全ての法令、条例、規則、および各省庁・学会等が定める最新のガイドライン等を、自らの責任において遵守するものとします。これらの適用判断についても、利用者が自ら関係各所に確認するものとし、本サイトは一切の責任を負いません。
第3条(医療行為における責任)
- 本サイトで紹介するAI技術・手法は、あくまで研究段階の技術的解説であり、実際の臨床現場での診断・治療を代替、補助、または推奨するものでは一切ありません。
- 医行為等に関する最終的な判断、決定、およびそれに伴う一切の責任は、必ず法律上その資格を認められた医療専門家(医師、歯科医師等)が負うものとします。AIによる出力を、資格を有する専門家による独立した検証および判断を経ずに利用することを固く禁じます。
- 本サイトの情報に基づくいかなる行為によって利用者または第三者に損害が生じた場合も、本サイト運営者は一切の責任を負いません。実際の臨床判断に際しては、必ず担当の医療専門家にご相談ください。本サイトの利用によって、利用者と本サイト運営者の間に、医師と患者の関係、またはその他いかなる専門的な関係も成立するものではありません。
第4条(情報の正確性・完全性・有用性)
- 本サイトは、掲載する情報(数値、事例、ソースコード、ライブラリのバージョン等)の正確性、完全性、網羅性、有用性、特定目的への適合性、その他一切の事項について、何ら保証するものではありません。
- 掲載情報は執筆時点のものであり、予告なく変更または削除されることがあります。また、技術の進展、ライブラリの更新等により、情報は古くなる可能性があります。利用者は、必ず自身で公式ドキュメント等の最新情報を確認し、自らの責任で情報を利用するものとします。
第5条(AI生成コンテンツに関する注意事項)
本サイトのコンテンツには、AIによる提案を基に作成された部分が含まれる場合がありますが、公開にあたっては人間による監修・編集を経ています。利用者が生成AI等を用いる際は、ハルシネーション(事実に基づかない情報の生成)やバイアスのリスクが内在することを十分に理解し、その出力を鵜呑みにすることなく、必ず専門家による検証を行うものとします。
第6条(知的財産権)
- 本サイトを構成するすべてのコンテンツに関する著作権、商標権、その他一切の知的財産権は、本サイト運営者または正当な権利を有する第三者に帰属します。
- 本サイトのコンテンツを引用、転載、複製、改変、その他の二次利用を行う場合は、著作権法その他関連法規を遵守し、必ず出典を明記するとともに、権利者の許諾を得るなど、適切な手続きを自らの責任で行うものとします。
第7条(プライバシー・倫理)
本サイトで紹介または言及されるデータセット等を利用する場合、利用者は当該データセットに付随するライセンス条件および研究倫理指針を厳格に遵守し、個人情報の匿名化や同意取得の確認など、適用される法規制に基づき必要とされるすべての措置を、自らの責任において講じるものとします。
第8条(利用環境)
本サイトで紹介するソースコードやライブラリは、執筆時点で特定のバージョンおよび実行環境(OS、ハードウェア、依存パッケージ等)を前提としています。利用者の環境における動作を保証するものではなく、互換性の問題等に起因するいかなる不利益・損害についても、本サイト運営者は責任を負いません。
第9条(免責事項)
- 本サイト運営者は、利用者が本サイトを利用したこと、または利用できなかったことによって生じる一切の損害(直接損害、間接損害、付随的損害、特別損害、懲罰的損害、逸失利益、データの消失、プログラムの毀損等を含みますが、これらに限定されません)について、その原因の如何を問わず、一切の法的責任を負わないものとします。
- 本サイトの利用は、学習および研究目的に限定されるものとし、それ以外の目的での利用はご遠慮ください。
- 本サイトの利用に関連して、利用者と第三者との間で紛争が生じた場合、利用者は自らの費用と責任においてこれを解決するものとし、本サイト運営者に一切の迷惑または損害を与えないものとします。
- 本サイト運営者は、いつでも予告なく本サイトの運営を中断、中止、または内容を変更できるものとし、これによって利用者に生じたいかなる損害についても責任を負いません。
第10条(規約の変更)
本サイト運営者は、必要と判断した場合、利用者の承諾を得ることなく、いつでも本規約を変更することができます。変更後の規約は、本サイト上に掲載された時点で効力を生じるものとし、利用者は変更後の規約に拘束されるものとします。
第11条(準拠法および合意管轄)
本規約の解釈にあたっては、日本法を準拠法とします。本サイトの利用および本規約に関連して生じる一切の紛争については、東京地方裁判所を第一審の専属的合意管轄裁判所とします。
For J³, may joy follow you.